New benchmark report: Psyclone AIOS vs NATS, ROS 2, iceoryx & more
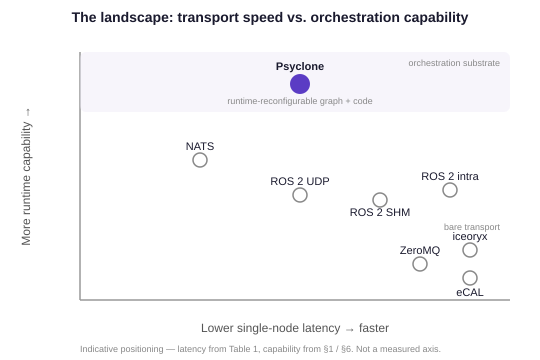
A rigorous single-node latency benchmark of Psyclone AIOS against NATS, ROS 2, iceoryx, eCAL and ZeroMQ – competitive default speed, the tightest tails measured, and the runtime-reconfiguration capabilities that set it apart.